金桔
金币
威望
贡献
回帖0
精华
在线时间 小时
|
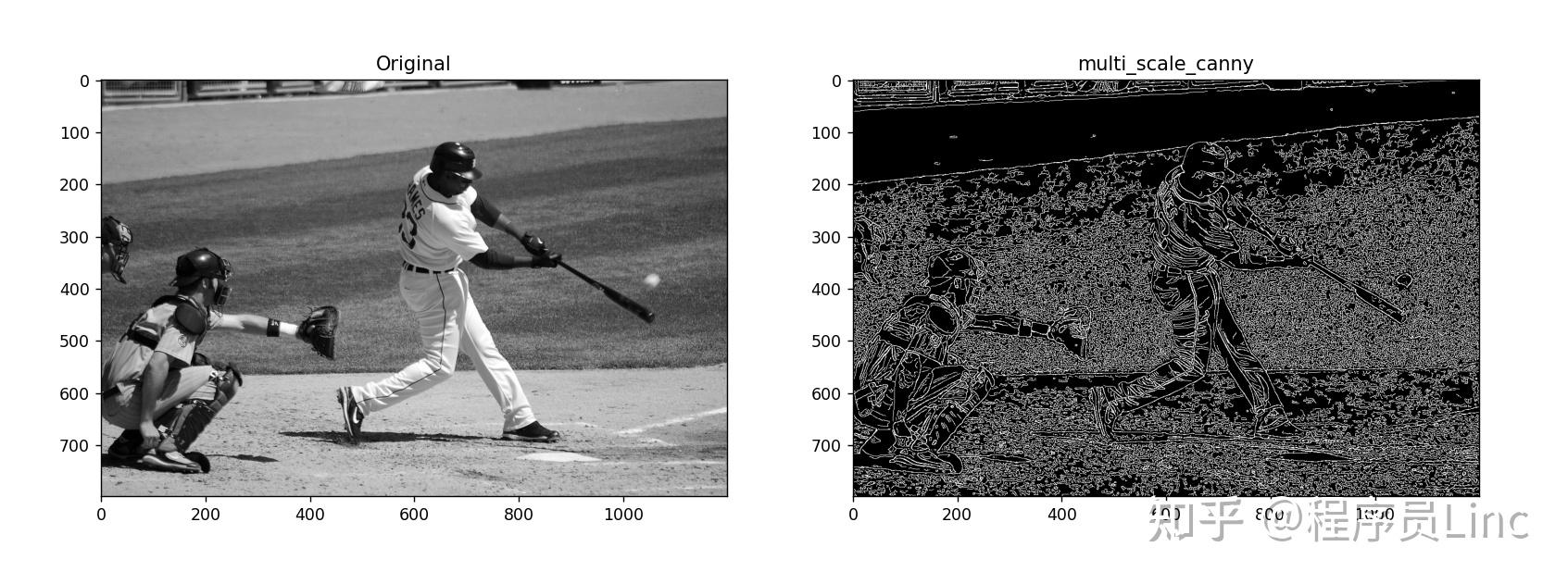
一、多尺度边缘检测方法
多尺度边缘检测通过在不同分辨率/平滑度下分析图像,实现:
- 粗尺度(大σ值):抑制噪声,提取主体轮廓
- 细尺度(小σ值):保留细节,检测微观缺陷
- 尺度融合:综合各层级特征形成完整边缘描述
1.1 数学表达(高斯尺度空间)
图像 在尺度 在尺度 ( ( )下的表示为: )下的表示为:

其中高斯核
<hr/>1.2 典型案例
高斯金字塔多尺度Canny
import cv2
import numpy as np
import matplotlib.pyplot as plt
def multi_scale_canny(img, scales=[1.0, 2.0, 4.0]):
# 初始化结果矩阵
edges_stack = np.zeros_like(img, dtype=np.uint8)
for sigma in scales:
# 高斯模糊
blurred = cv2.GaussianBlur(img, (0, 0), sigmaX=sigma)
# 动态阈值Canny(阈值随尺度调整)
low_thresh = int(30 * (sigma / 2.0))
high_thresh = int(90 * (sigma / 2.0))
edges = cv2.Canny(blurred, low_thresh, high_thresh)
# 多尺度叠加
edges_stack = cv2.bitwise_or(edges_stack, edges)
return edges_stack
img = cv2.imread(&#34;../sports.jpg&#34;, 0)
result = multi_scale_canny(img, scales=[1.0, 2.0, 4.0])
plt.figure(figsize=(15, 5))
plt.subplot(121), plt.imshow(img, cmap=&#39;gray&#39;), plt.title(&#39;Original&#39;)
plt.subplot(122), plt.imshow(result, cmap=&#39;gray&#39;), plt.title(&#39;multi_scale_canny&#39;)
plt.show()
高斯金字塔多尺度
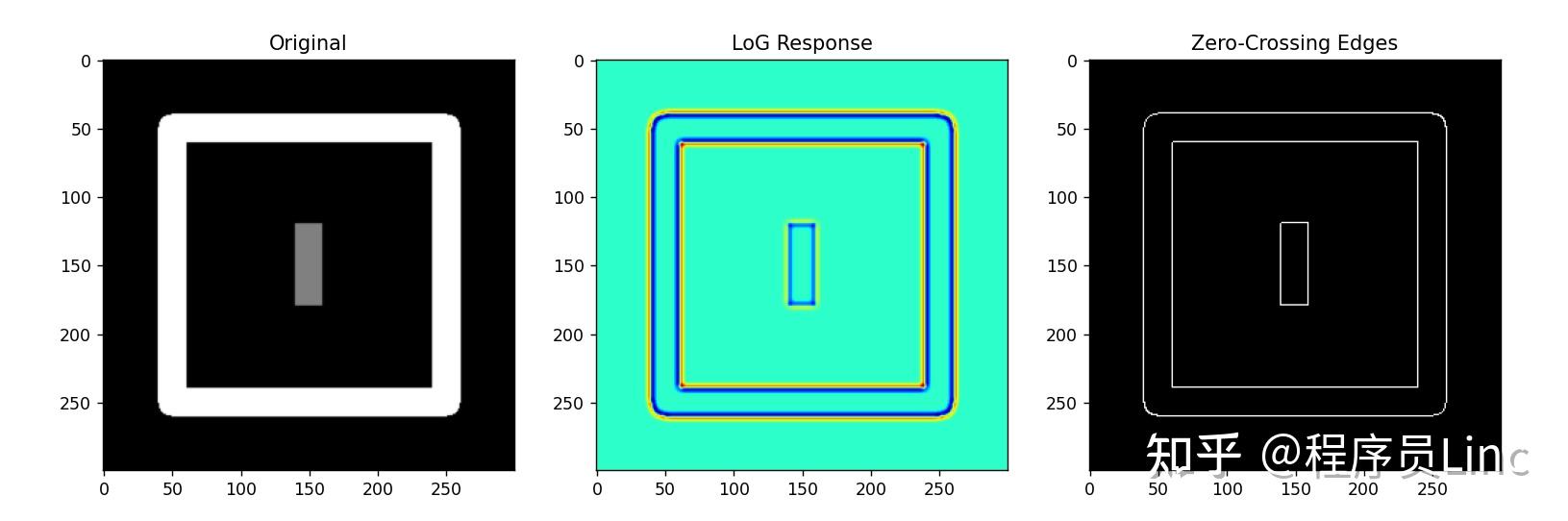
Laplacian of Gaussian(LoG)算子
Laplacian of Gaussian(LoG)是一种基于二阶导数的边缘检测方法,通过结合高斯平滑与拉普拉斯算子实现多尺度边缘检测,其核心优势在于:
- 噪声免疫:高斯滤波先消除高频噪声,再进行边缘定位
- 零交叉特性:通过检测二阶导数过零点(Zero-Crossing)精确定位边缘中心
- 多尺度适应:调节高斯核σ值可控制边缘检测的粗细程度
数学表达式:

实际应用中常使用离散近似核(如9×9核,σ=1.4)
代码例子
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 生成测试图像
img = np.zeros((300, 300), dtype=np.uint8)
cv2.rectangle(img, (50, 50), (250, 250), 200, 20) # 灰色矩形框
img[120:180, 140:160] = 100 # 添加垂直划痕
img = cv2.GaussianBlur(img, (5, 5), 0.5) # 模拟表面模糊
# LoG计算
gaussian = cv2.GaussianBlur(img, (9, 9), sigmaX=1.4)
laplacian = cv2.Laplacian(gaussian, cv2.CV_64F, ksize=3)
# 过零检测
log_edges = np.zeros_like(img, dtype=np.uint8)
h, w = laplacian.shape
for i in range(1, h - 1):
for j in range(1, w - 1):
# 检测相邻像素符号变化
if (laplacian[i, j] * laplacian[i + 1, j] < 0) or \
(laplacian[i, j] * laplacian[i, j + 1] < 0):
log_edges[i, j] = 255
# 可视化
plt.figure(figsize=(15, 5))
plt.subplot(131), plt.imshow(img, cmap=&#39;gray&#39;), plt.title(&#39;Original&#39;)
plt.subplot(132), plt.imshow(laplacian, cmap=&#39;jet&#39;), plt.title(&#39;LoG Response&#39;)
plt.subplot(133), plt.imshow(log_edges, cmap=&#39;gray&#39;), plt.title(&#39;Zero-Crossing Edges&#39;)
plt.show()
LoG
小波多分辨率检测
使用OpenCV的高斯金字塔模拟小波多尺度分解,通过残差计算提取高频信息,实现多分辨率边缘检测。
import cv2
import numpy as np
def opencv_wavelet_edge(img, levels=3):
# 初始化高斯金字塔
pyramid = [img.astype(np.float32)]
# 构建高斯金字塔
for _ in range(levels):
layer = cv2.pyrDown(pyramid[-1])
pyramid.append(layer)
# 各尺度边缘检测
edges = []
for i in range(1, levels+1):
# 上采样重建低频图像
upsampled = cv2.pyrUp(pyramid, dstsize=pyramid[i-1].shape[::-1])
# 计算高频残差(近似小波高频子带)
residual = cv2.subtract(pyramid[i-1], upsampled)
residual = cv2.normalize(residual, None, 0, 255, cv2.NORM_MINMAX)
# 动态阈值Canny(基于尺度调整)
thresh_low = 30 + 20*(i-1)
thresh_high = 90 + 20*(i-1)
edge_layer = cv2.Canny(np.uint8(residual), thresh_low, thresh_high)
# 尺寸对齐(避免层级尺寸不匹配)
if edge_layer.shape != img.shape:
edge_layer = cv2.resize(edge_layer, img.shape[::-1])
edges.append(edge_layer)
# 多尺度融合(加权叠加)
final = cv2.addWeighted(edges[0], 0.5, edges[1], 0.3, 0)
if levels > 2:
final = cv2.addWeighted(final, 0.7, edges[2], 0.2, 0)
return final
# 使用示例
img = cv2.imread(&#34;sports.jpg&#34;, 0)
result = opencv_wavelet_edge(img, levels=3)
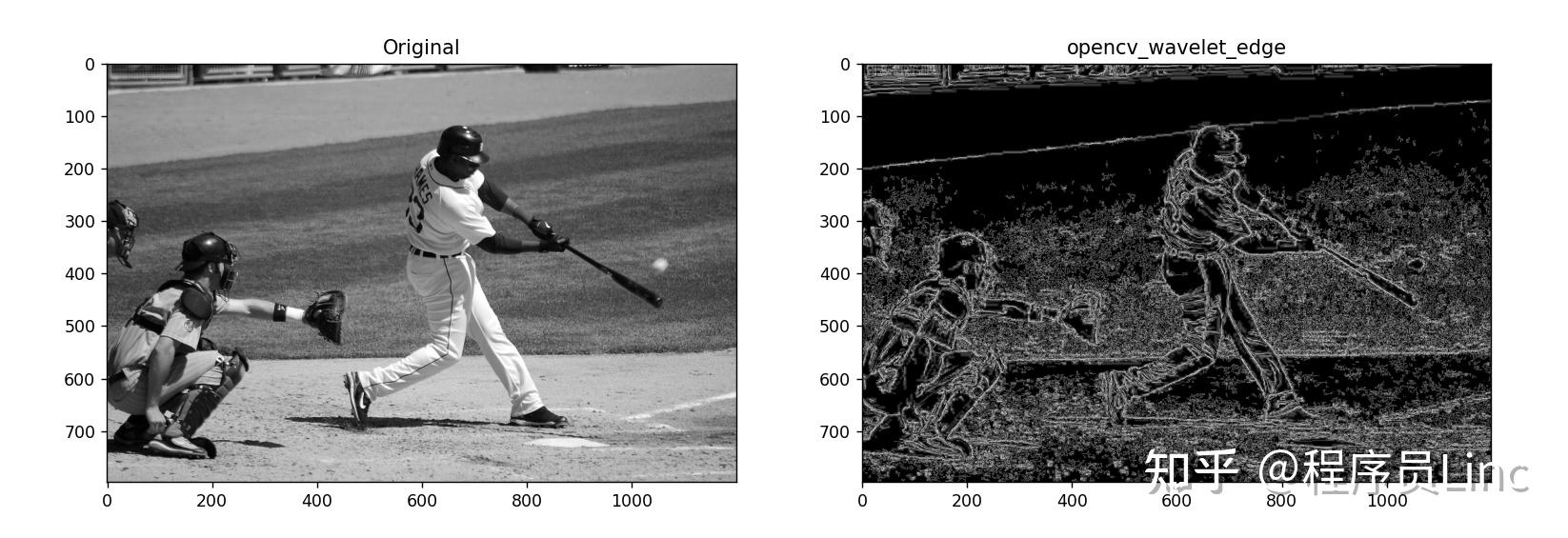
小波检测
二、形态学方法
1.1 核心原理与基础操作
形态学方法基于集合论和结构元素对图像进行形状分析,主要操作包括:
| 操作类型 | 数学定义 | 视觉效果 | 工业应用场景 | | 腐蚀 | A \ominus B \\ | 收缩物体,消除细小噪声 | 去除塑料表面微小噪点 | | 膨胀 | A \oplus B \\ | 扩张物体,填充孔洞 | 连接断裂的注塑件边缘 | | 开运算 | (A \ominus B) \oplus B \\ | 平滑轮廓,保持主体形状 | 毛刺去除 | | 闭运算 | (A \oplus B) \ominus B \\ | 闭合小孔,连接邻近区域 | 气泡缺陷修复 |
<hr/>2.1 基础形态学操作
import cv2
import numpy as np
def morphology_optimization(edges):
# 定义结构元素(十字形消除毛刺,椭圆形填充孔洞)
kernel_cross = cv2.getStructuringElement(cv2.MORPH_CROSS, (3,3))
kernel_ellipse = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5,5))
# 去噪:开运算消除孤立噪点
cleaned = cv2.morphologyEx(edges, cv2.MORPH_OPEN, kernel_cross)
# 连接:闭运算修复断裂边缘
connected = cv2.morphologyEx(cleaned, cv2.MORPH_CLOSE, kernel_ellipse)
# 细化处理(可选)
thin = cv2.ximgproc.thinning(connected)
return thin
canny_edges = cv2.Canny(img, 50, 150) # 初始Canny边缘
kernel = np.ones((3, 3), np.uint8)
edges = cv2.dilate(canny_edges, kernel, iterations=1)
optimized_edges = morphology_optimization(canny_edges)
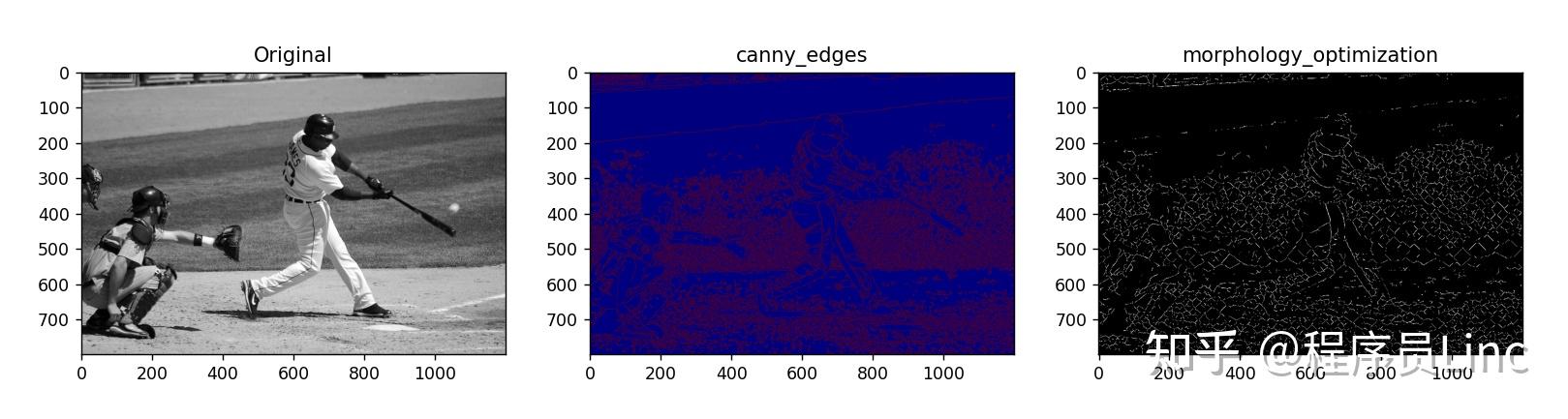
形态学操作 |
|

 /3
/3 

 浙公网安备33010802005999号
浙公网安备33010802005999号 



 2026庆【网站十三周
2026庆【网站十三周 2025庆【网站十二周
2025庆【网站十二周 2024庆中秋、迎国庆
2024庆中秋、迎国庆 2024庆【网站十一周
2024庆【网站十一周 2023庆【网站十周年
2023庆【网站十周年 2022庆【网站九周年
2022庆【网站九周年

 雷达卡
雷达卡 发表于 2025-7-4 13:09
发表于 2025-7-4 13:09


 提升卡
提升卡


