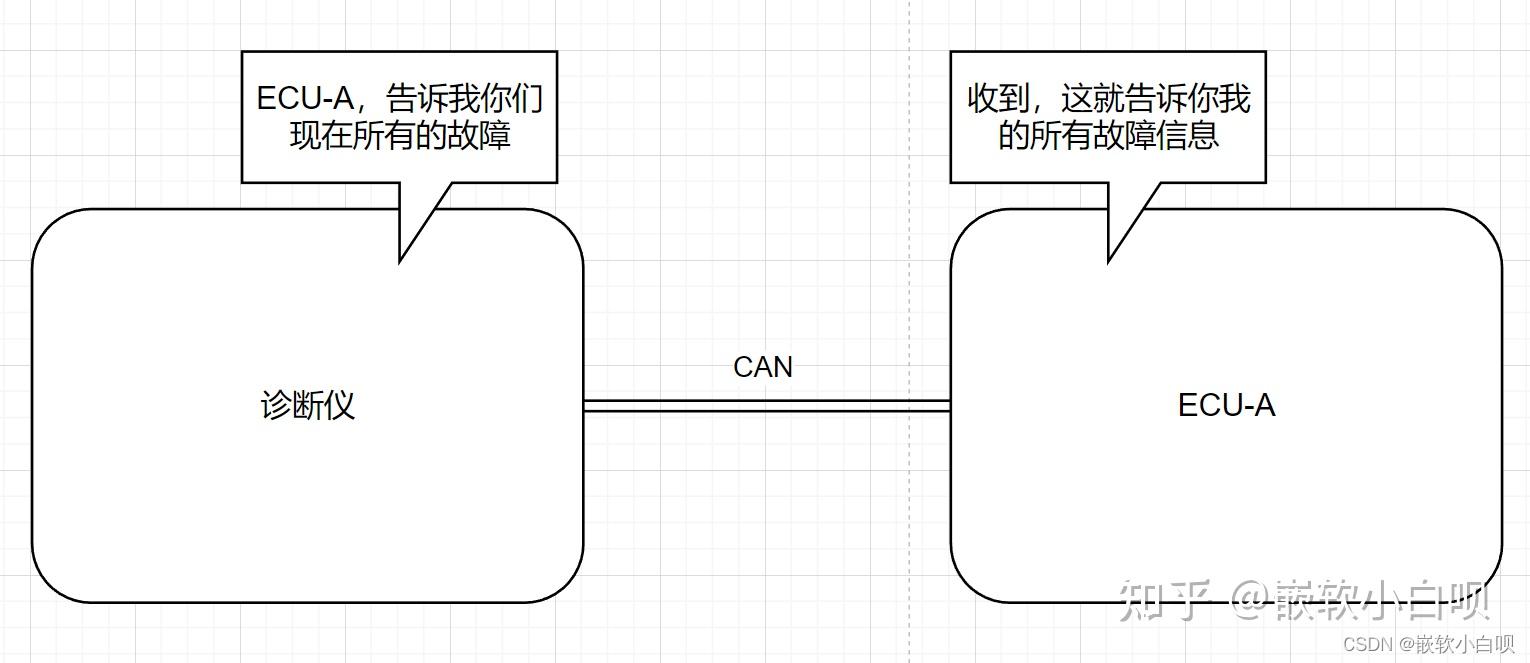
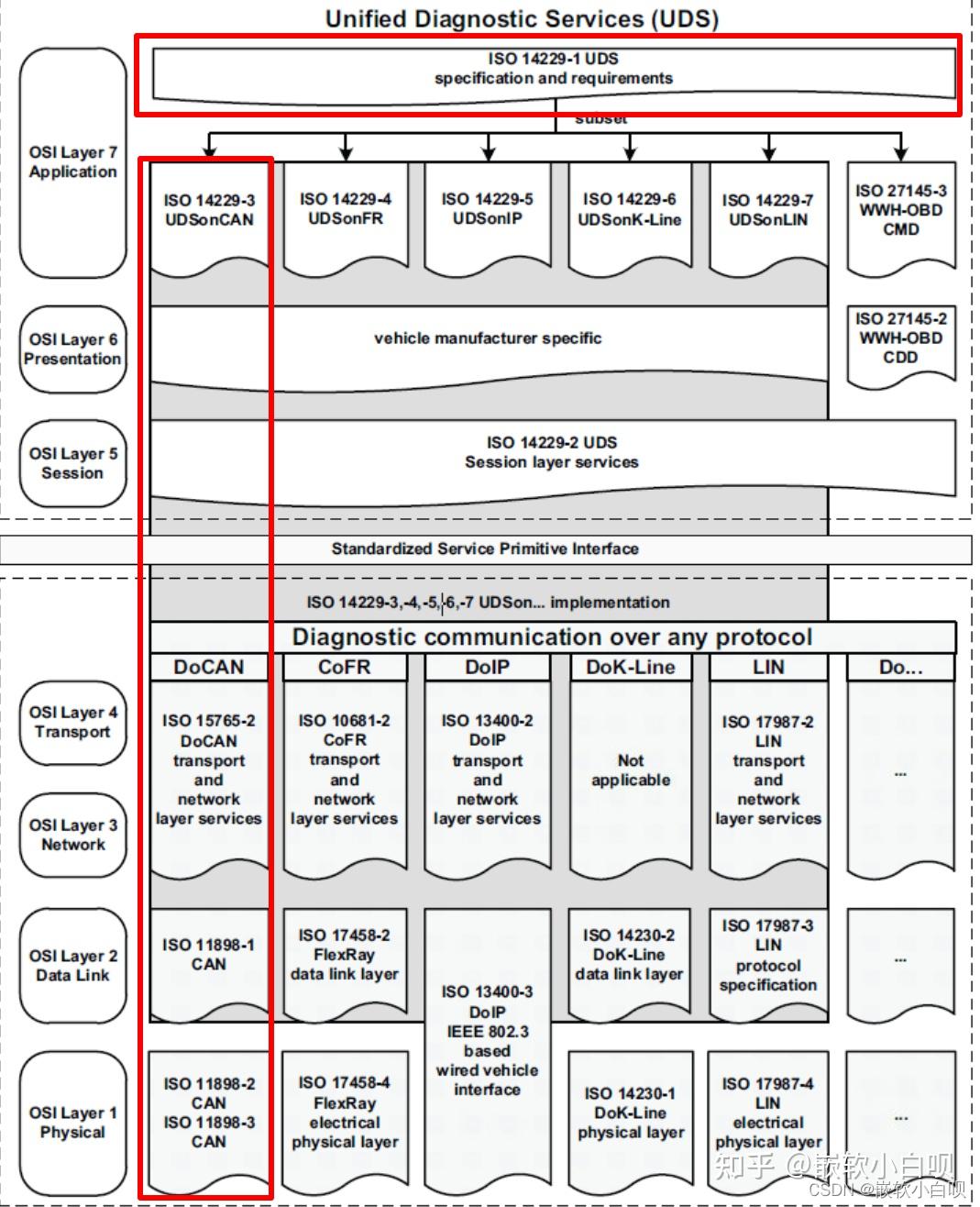
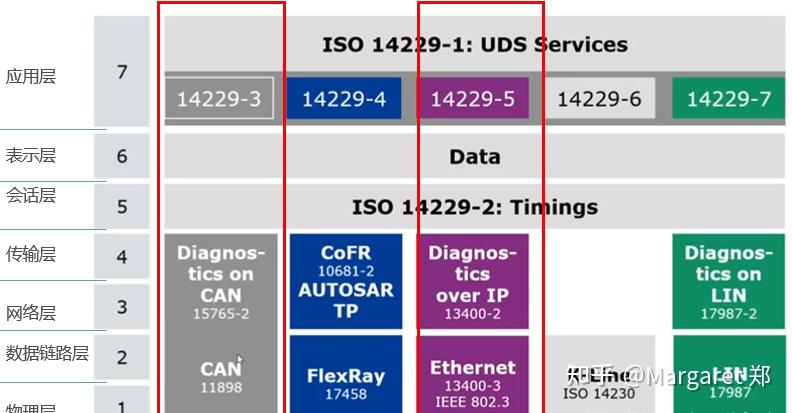
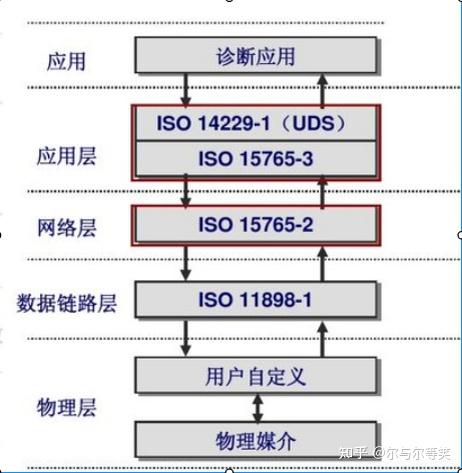
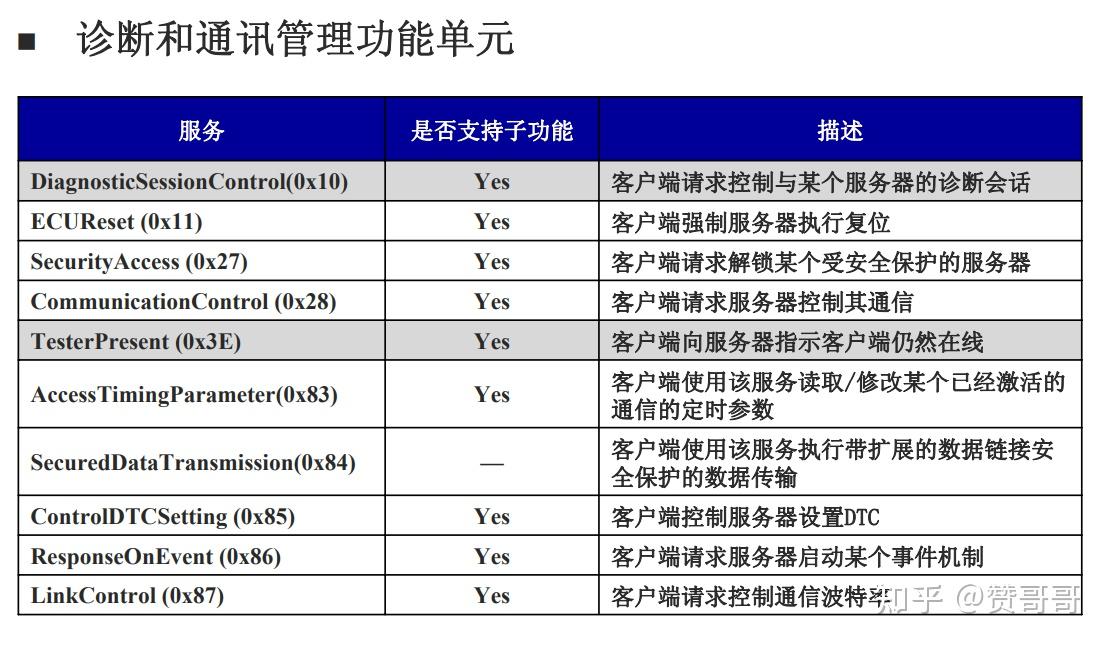
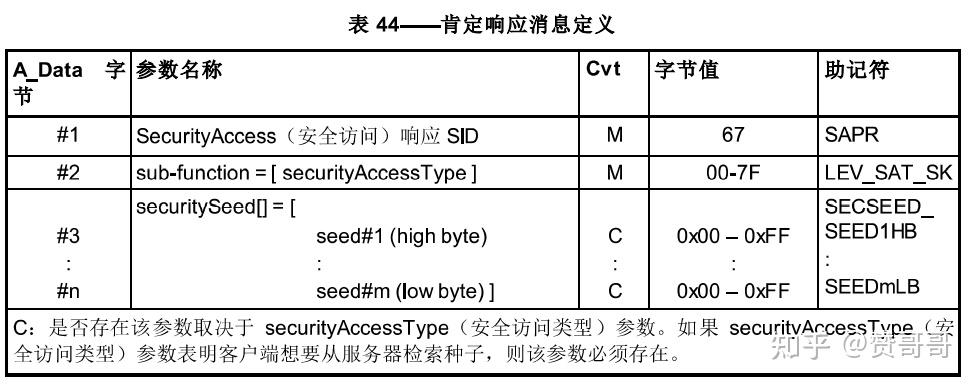
该部分定义了 ISO 14229-1 定义的诊断服务是如何适用于 CAN 的。对于每一个应用服务,都定义了可用的子功能及数据参数。
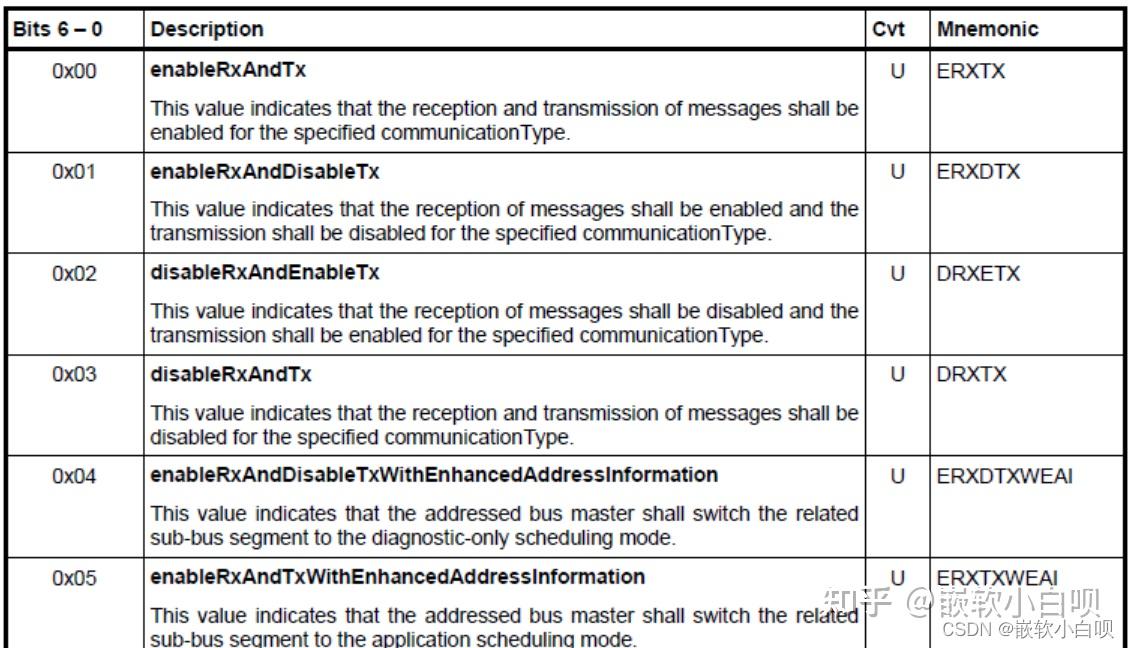
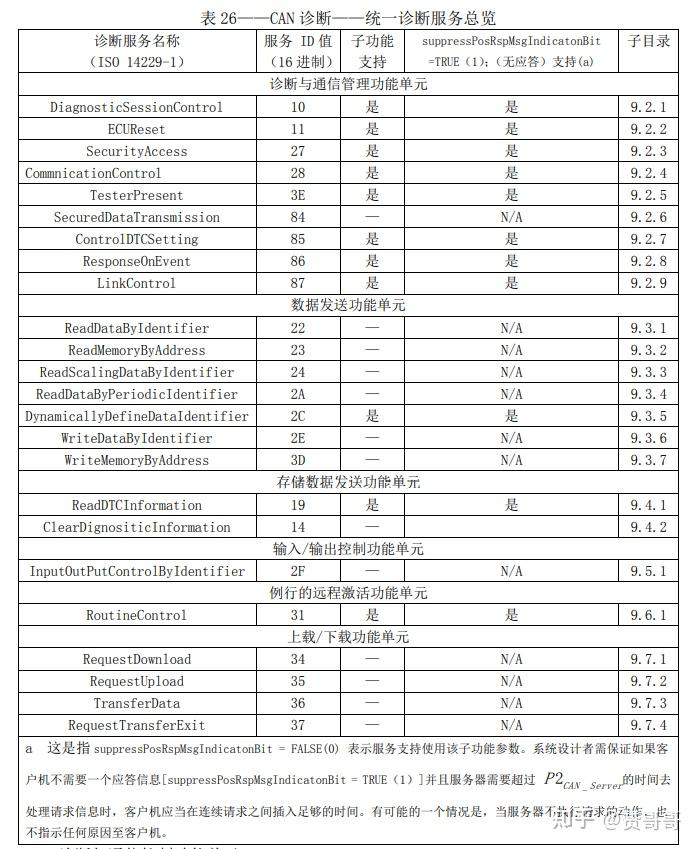
注意:子功能参数的定义考虑了 suppressPosRspMsgIndicatonBit 参数的最高有效位。该参数在 ISO 14229-1 中定义。
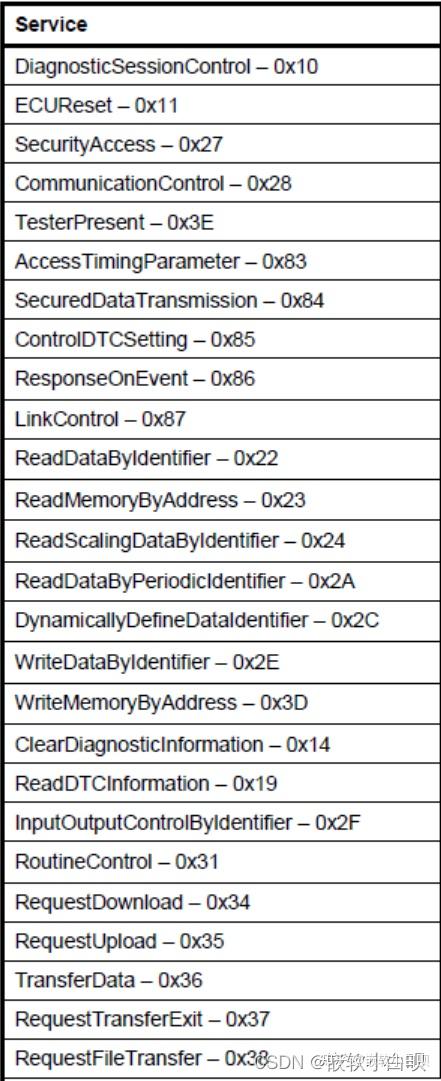
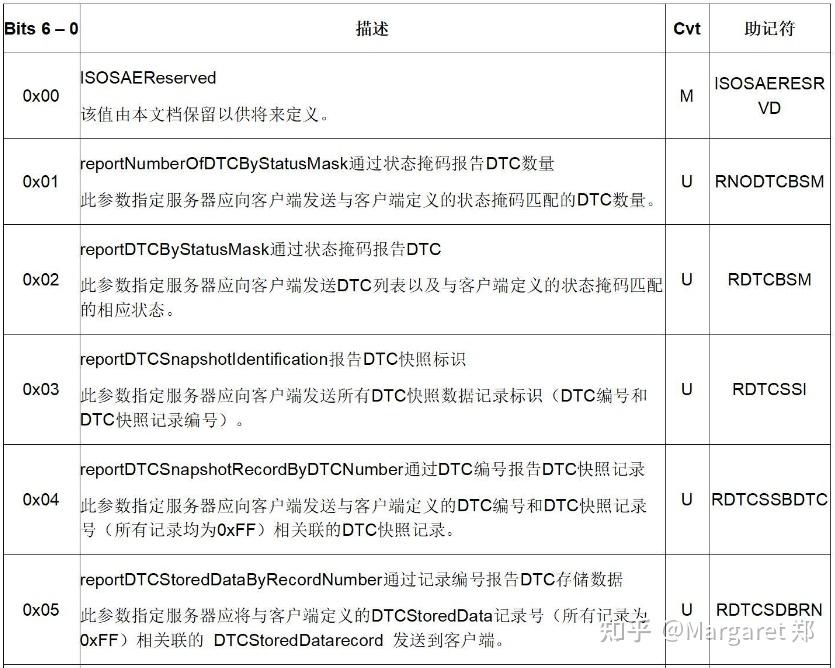
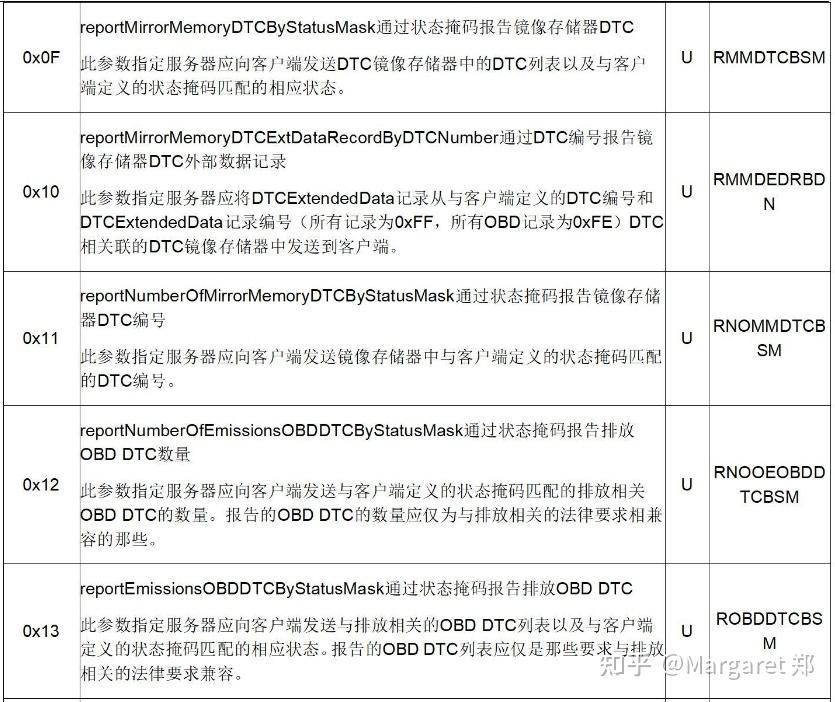
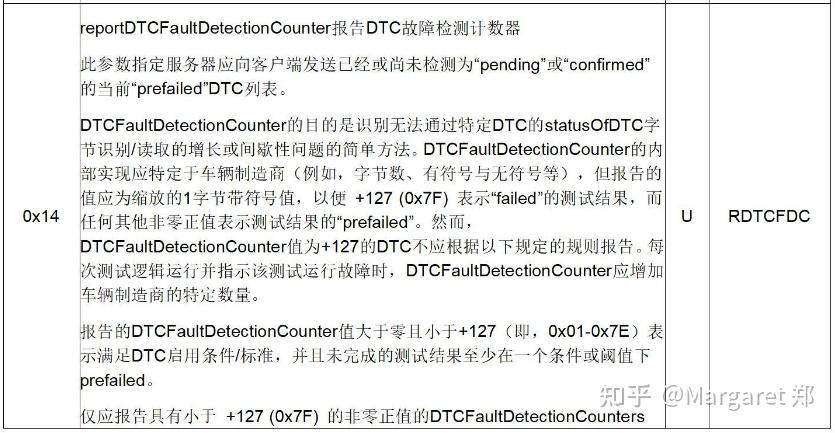
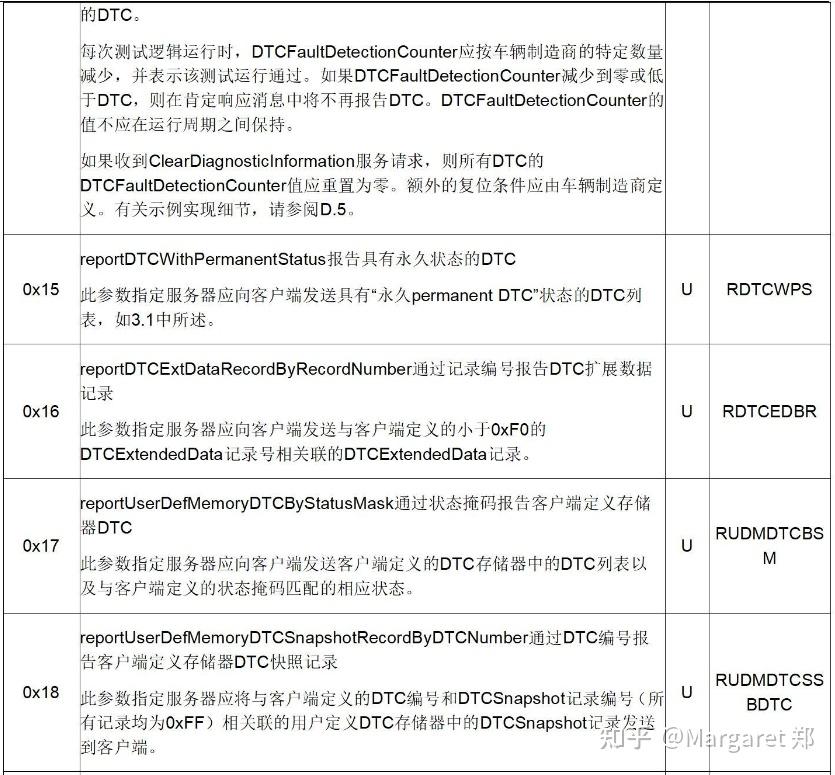
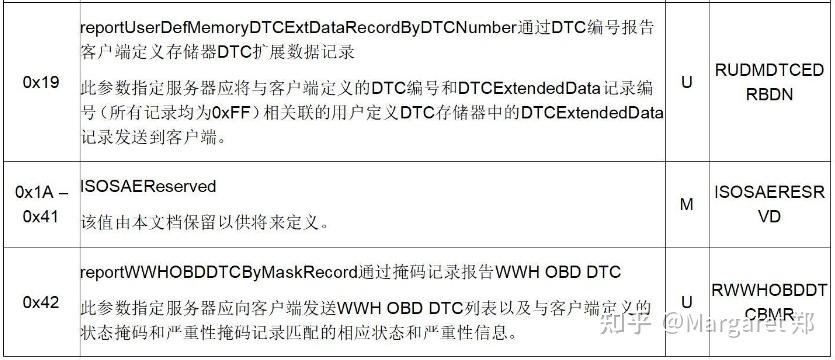
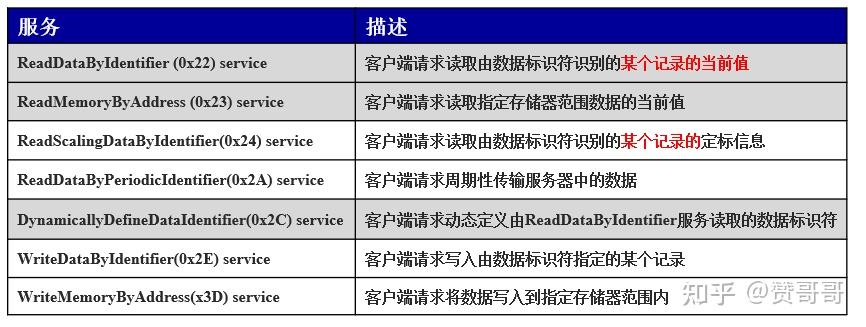
表 26 用于提供所有统一诊断服务的总览,它们适用于 CAN 诊断实施,表包含了可用服务总数。使用该部分ISO 15765 协议实施 CAN 诊断的某些应用上可能限制了可使用服务的数量, 并可将它们按应用范围/诊断会话(默认会话,编程会话等)进行归类。

 /3
/3 

 浙公网安备33010802005999号
浙公网安备33010802005999号 




 2025庆【网站十二周
2025庆【网站十二周 2024庆中秋、迎国庆
2024庆中秋、迎国庆 2024庆【网站十一周
2024庆【网站十一周 2023庆【网站十周年
2023庆【网站十周年 2022庆【网站九周年
2022庆【网站九周年 2021庆中秋、迎国庆
2021庆中秋、迎国庆

 雷达卡
雷达卡 发表于 2025-6-22 06:45
发表于 2025-6-22 06:45


 提升卡
提升卡